水平横渡让救援可以在水平方向运送伤员,于是有人想到释放绳桥,这就实现了担架垂直下方,这就是 V型系统:

但V系统在落差高的场景下放后绳桥很难重新恢复到水平状态。

所以增加两条绳通过滑轮和主锁的转向形成了垂直提拉绳,实现了担架提拉下放和左右移动的功能。
但此时系统有一定的风险:
-
当左边的牵引断掉,除非将担架拉至最高点否则担架很难向左移动。
-
当右边的牵引断掉,担架会由于提拉绳受的力量而向左边高速移动而撞上崖壁。

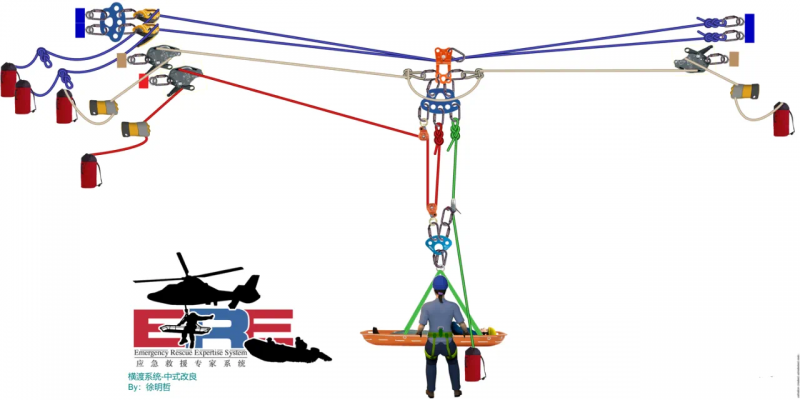
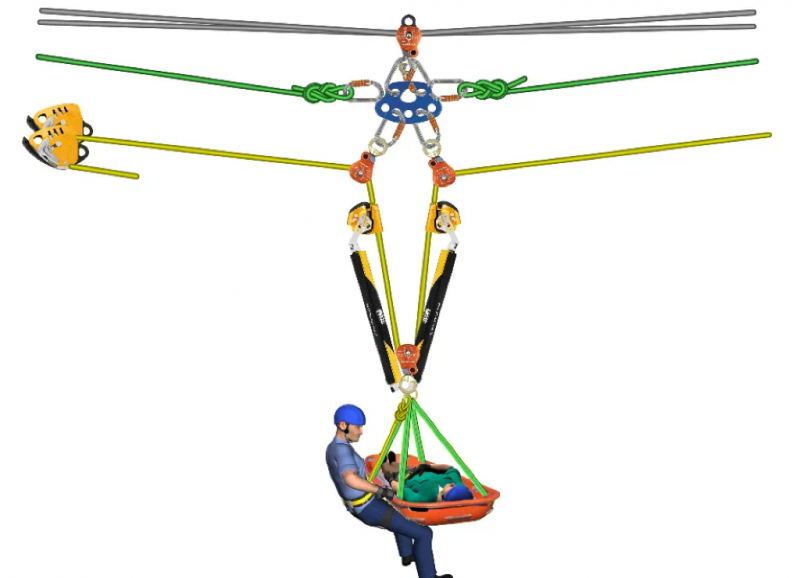
后来,大家发现提拉2个人的重量很费力,所以就在提拉系统上设置了省力系统,这就是传统T型的基本形态。

然而,传统T当担架上升至顶部后左右移动时,仍然需要配合收紧或释放提拉绳。
-
担架向左运行时,如果不继续收提拉绳,担架高度会随着拉左侧牵引而下降。
-
担架向右运行时,如果不继续放提拉绳,提拉绳的绳头卡住上方滑轮,右边牵引是拉不动的。
-
在担架水平运行时,即便提拉绳配合得当,也很难做到担架高度始终是稳定的。
于是,在担架与上方大滑轮/分力板之间又加了两个短链接:
-
担架左右移动时,通过短链接将担架分力板与上方的系统分力板相连,这样只需要保持提拉绳及其备份在视觉上不松弛即可。
-
担架要上下移动时,首先收紧提拉绳,由担架手解开短链接即可。
这样就解决了水平运行时担架高度不稳定的问题。
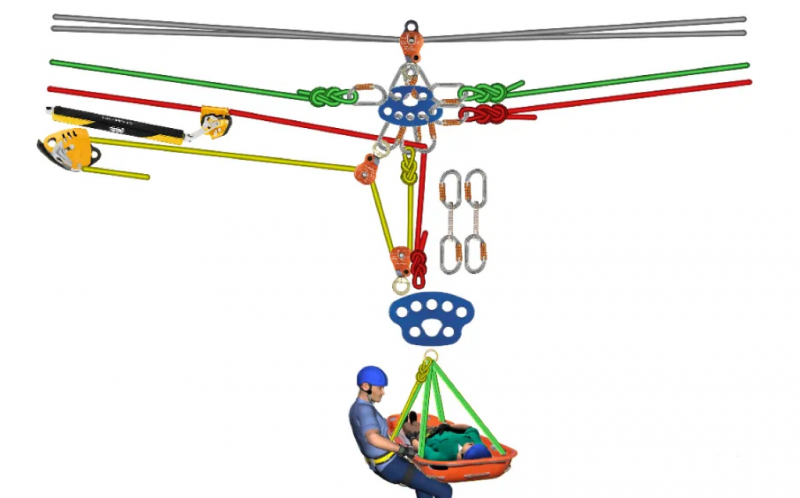
再后来,系统手发现,垂直提拉担架时除了要拉主绳外,还要去收那个ASAP,烦裘得很。于是把这个活交给了担架手:

提拉备份绳直接连接在上方系统分力板,在担架分力板/圆环上用一个ASAP抓住。
因为ASAP会随走,担架下降时非常省心。担架上升时,需要担架手时刻推着ASAP,在上方系统手复位的间隙,担架手也不能闲着,要把下方多余的绳子塞进绳包里。
这,就是传统改良式了。
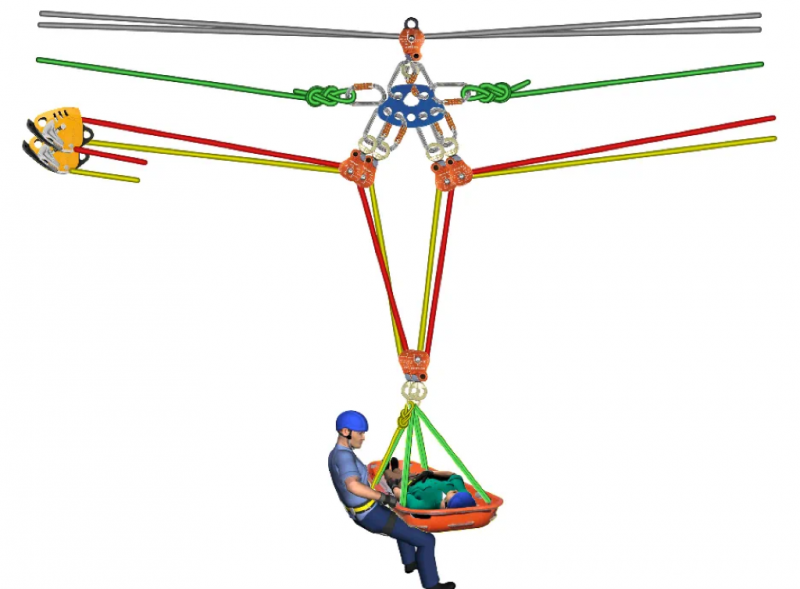
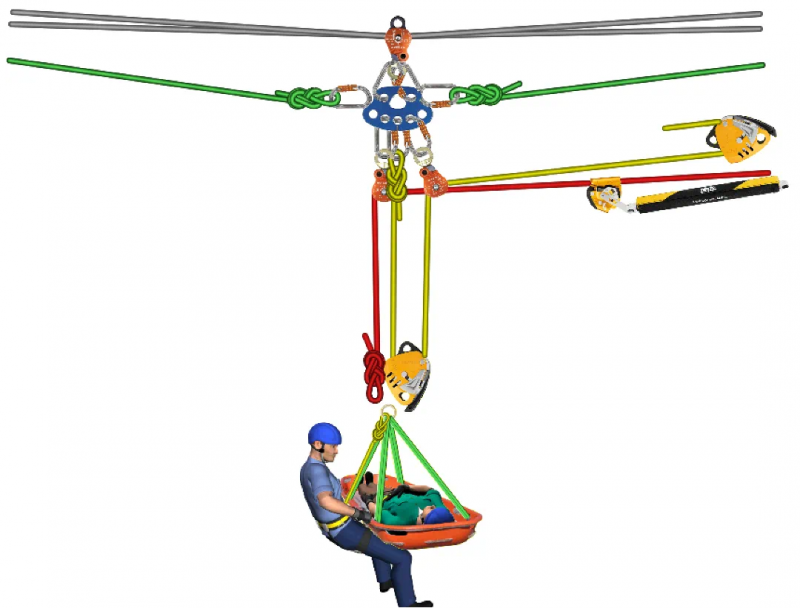
后来呢,有人把ASAP换成一个机械抓结。不需要额外加2个短链接,就可以解决水平运行时担架高度不稳的问题。
而且,当右侧牵引断掉时,担架的重量也在机械抓结上,并不会不受控制的向左侧运动。所以右侧牵引也变成了单条。这是中式T型,由蜗牛老师发明。
为了解决水平运行时担架高度不稳的问题,傲娇的英国人也弄出了一套方案:
这个就是英式T型了,最大的缺点是费绳长。
注:提拉绳部分可以是3个双滑轮。为方便观看理解,这里我画了6个单滑轮。
我在开头说过,所有的「改良」都是在其提拉绳的备份上做文章,那么英式改良是什么样呢?
换了2个ASAP上去,省一条绳。当然也可以像前面传统改良那样,用一条绳连在顶部分力板垂下来,用1个ASAP去抓住。此处不再赘画
下面我们再来看看小日子的做法:
绳桥和牵引部分不变,提拉绳下方连接担架的滑轮变成了一个可以单向锁止并在受力状态下释放的装置(A-bloc)。这样可以让担架手自行控制担架下降,担架上升其实就相当于A-bloc的微距上升,当担架升至顶部分力板后,由于单向锁止的特性,担架不会下落。

可以把连接担架的A-bloc看作一个下降器,下降器的制动端绳索如果断掉没有关系,负载不会坠落。但如果下降器的锚点端绳索断掉,负载会直接坠落。
所以这里要备份锚点端那一侧,用ASAP连接担架,抓在对面制动端的绳上。这也是看起来最简洁的一种了。
至此,我们已经将目前所有常见的T型及衍生改良都看过了一遍,依次是:
传统T、传统改良、中式T、英式T、英式改良、日式T、日式改良。